摘要: 如果说“列图像”是搭积木,“解的结构”是空间平移,那么今天我们要站在上帝视角,把矩阵看作一台精密的“空间变换机器”。这将是你理解线性代数最关键的一次思维升华。
0. 矩阵的真面目
系列回顾:专题(1) 行与列图像 | 专题(2) 解的结构
在之前的文章里,我们把矩阵 $\mathbf{A}$ 看作是一组方程的系数(行视角),或者是一组积木的集合(列视角)。 但现代数学家更喜欢把它看作一个函数,或者说一个映射 (Mapping)。
$$ T(\boldsymbol{x}) = \mathbf{A}\boldsymbol{x} $$
把 $\mathbf{A}$ 想象成一台机器:
- 输入:一个向量 $\boldsymbol{x}$(来自 $\mathbb{R}^n$ 空间)。
- 处理:经过矩阵 $\mathbf{A}$ 的乘法运算。
- 输出:一个新的向量 $\boldsymbol{b}$(进入 $\mathbb{R}^m$ 空间)。
这不仅仅是数字的计算,而是空间的变换。
- 它可以把一个正方形拉伸成平行四边形。
- 它可以把整个空间旋转、镜像。
- 它甚至可以把高维空间“压扁”成低维空间。
1. 核空间:被“吃掉”的维度
还记得我们在上一期讲的核空间 (Kernel) 吗?也就是 $\mathbf{A}\boldsymbol{x}=\boldsymbol{0}$ 的解集。 在“机器”的视角下,它的含义变得有点可怕:
核空间里的所有向量,在经过机器 $\mathbf{A}$ 处理后,都变成了 $\boldsymbol{0}$。
换句话说,这些向量所代表的信息,被这台机器毁灭了,压缩了,降维了。
- 如果 $\text{Ker}(\mathbf{A})$ 只有零向量:说明机器保留了所有信息,没有“压扁”任何维度。变换是可逆的。
- 如果 $\text{Ker}(\mathbf{A})$ 是一条直线或平面:说明机器把整个空间沿着这个方向“拍扁”了。
这就是为什么方阵如果行列式为 0(奇异),它就不可逆。因为它把一部分空间“压”没了,你再也回不去了。
2. 像空间:机器的“能力边界”
机器输出的所有可能的向量 $\boldsymbol{b}$ 的集合,构成了另一个空间。 我们称之为像空间 (Image Space),其实它就是我们第一期讲的列空间 (Column Space)。
$$ \text{Im}(\mathbf{A}) = C(\mathbf{A}) $$
这代表了这台机器的能力边界。
- 无论你怎么调整输入 $\boldsymbol{x}$,输出 $\boldsymbol{b}$ 永远跑不出这个空间。
- 如果 $\boldsymbol{b}$ 在像空间里,方程有解。
- 如果 $\boldsymbol{b}$ 在像空间外,方程无解(机器造不出这个产品)。
3. 秩-零化度定理:能量守恒
在线性代数中,有一个堪称“能量守恒定律”的伟大定理:秩-零化度定理 (Rank-Nullity Theorem)。
$$ n = \text{rank}(\mathbf{A}) + \text{nullity}(\mathbf{A}) $$
- $n$:输入的总维度(原本的自由度)。
- $\text{rank}(\mathbf{A})$:像空间的维度(输出的有效维度)。
- $\text{nullity}(\mathbf{A})$:核空间的维度(被压扁的维度)。
直观理解: 你原本有 $n$ 维的信息。经过机器 $\mathbf{A}$ 处理后: 一部分维度保留了下来,变成了秩 (Rank); 另一部分维度被压缩成了 0,变成了零化度 (Nullity)。 它们加起来,必须等于原本的总维度 $n$。
4. 终极图景:四个基本子空间
至此,我们终于拼完了线性代数的完整拼图。 对于任意矩阵 $\mathbf{A}$,宇宙中存在四个神圣的子空间:
- 列空间 (Column Space):机器能造出的所有产品。
- 零空间 (Null Space):被机器毁灭的所有原料。
- 行空间 (Row Space):机器真正利用的有效原料(与零空间正交)。
- 左零空间 (Left Null Space):机器造不出的产品所在的“死角”。
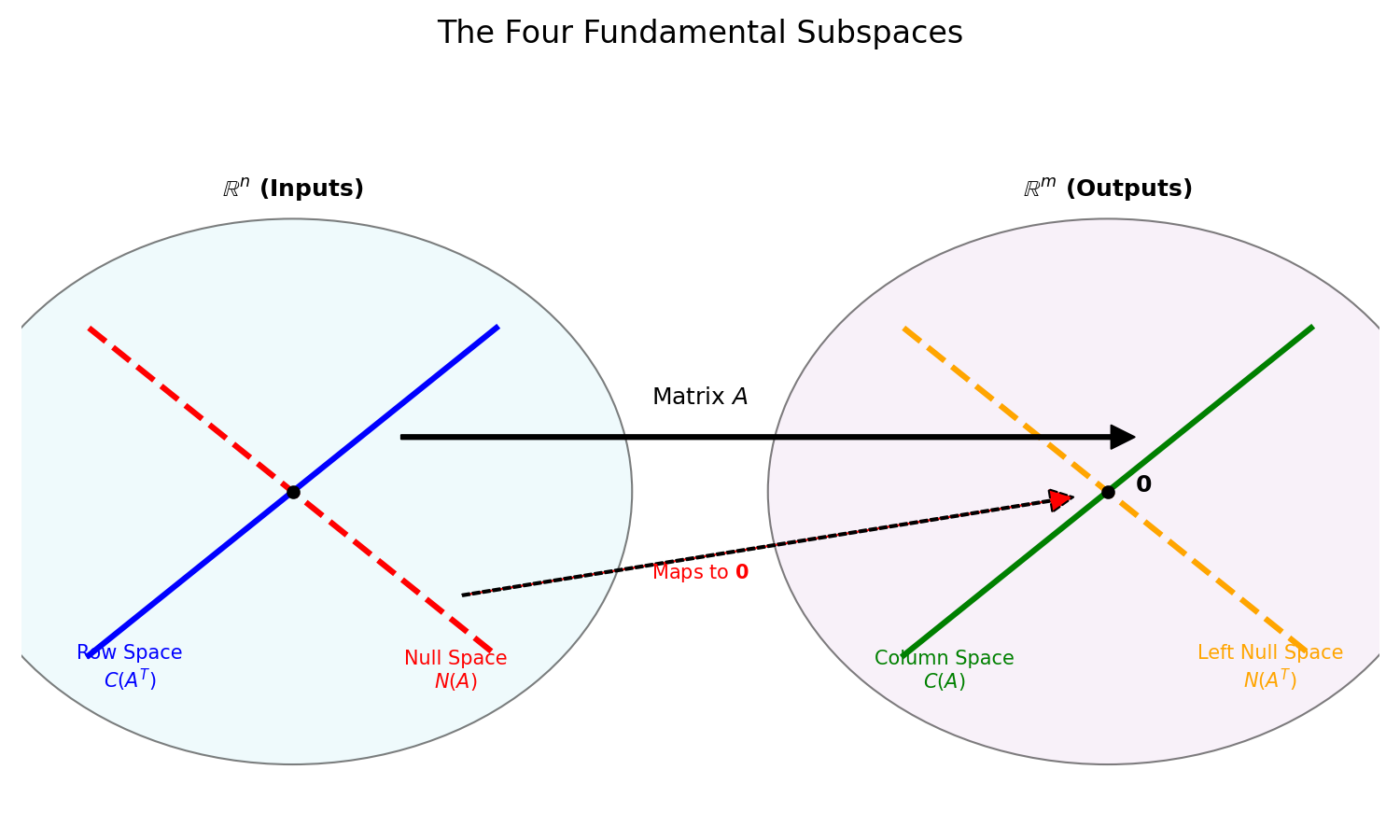 (图注:Strang 教授经典的“四个子空间”图示,展示了矩阵变换的完整几何图景)
(图注:Strang 教授经典的“四个子空间”图示,展示了矩阵变换的完整几何图景)
当你能闭上眼睛,在脑海中看到这四个空间如何正交、互补、映射时,恭喜你,你已经掌握了线性代数的心脏。
5. 图解核心:为什么行空间指向列空间?
你可能注意到了图中那个连接“行空间”和“列空间”的箭头。这其实揭示了矩阵变换最精妙的性质。
对于任意向量 $\boldsymbol{x}$,我们都可以把它分解为两部分:$\boldsymbol{x} = \boldsymbol{x}_r + \boldsymbol{x}_n$。
- $\boldsymbol{x}_n$ 属于零空间(会被矩阵变成 $\boldsymbol{0}$)。
- $\boldsymbol{x}_r$ 属于行空间(与零空间垂直)。
当我们进行矩阵乘法时: $$ \mathbf{A}\boldsymbol{x} = \mathbf{A}(\boldsymbol{x}_r + \boldsymbol{x}_n) = \mathbf{A}\boldsymbol{x}_r + \mathbf{0} = \mathbf{A}\boldsymbol{x}_r $$
这意味着:输出向量 $\boldsymbol{b}$ 完全是由 $\boldsymbol{x}$ 中的行空间分量 $\boldsymbol{x}_r$ 决定的!
更重要的是,在这个限制下,矩阵 $\mathbf{A}$ 变成了一个**一一对应(可逆)**的映射:
行空间里的每一个向量,都完美地对应着列空间里的一个向量。
这就是为什么我们说矩阵 $\mathbf{A}$ 是连接这两个空间的桥梁。
结语: 从 $\mathbf{A}\boldsymbol{x}=\boldsymbol{b}$ 出发,我们一路走过了:
- 行图像的超平面交集;
- 列图像的向量积木;
- 解结构的空间平移;
- 线性变换的降维打击。
希望这三篇文章,能帮你把那些枯燥的公式,变成脑海中生动的几何动画。线性代数不难,它只是需要一点想象力。